
El puesto del timonel en la "centrale" del U995. Señalado en rojo se encuentra el control hidráulico del timón, donde apreciamos perfectamente los pulsadores. Justo encima se encontraba un compás (desaparecido en el U995).
| Timones, planos de buceo y sistemas de maniobra |
| Maquinaria auxiliar del buque |
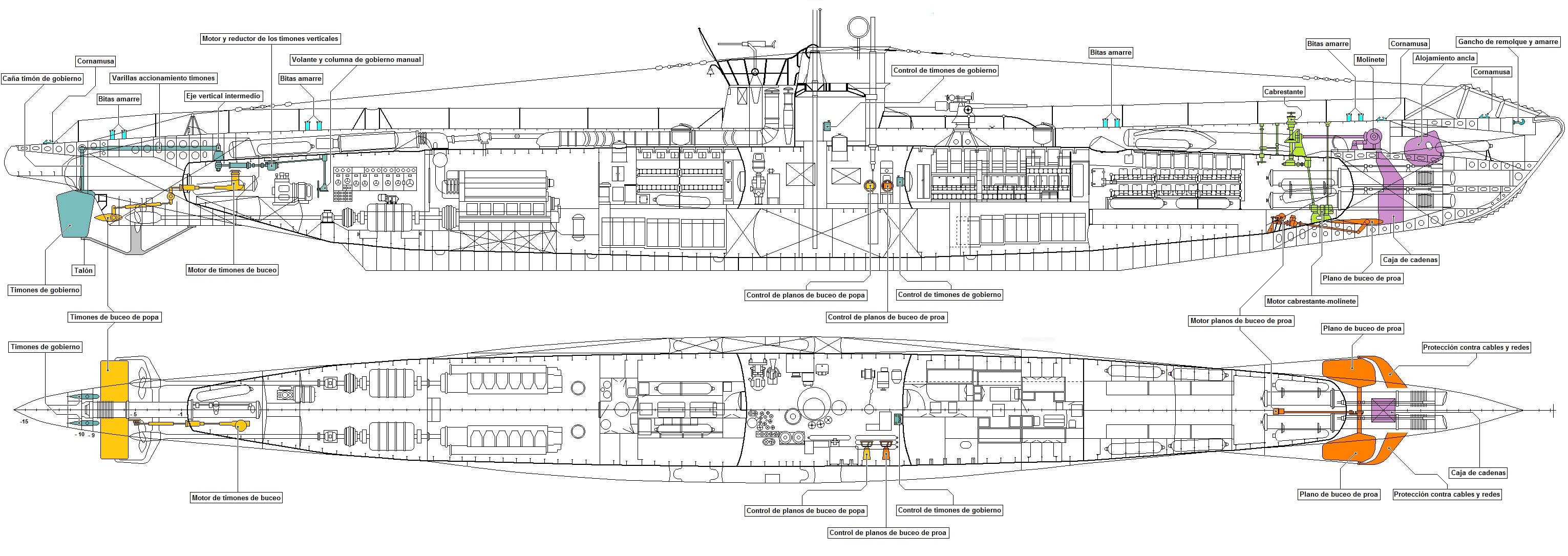
Timones principales y planos de inmersión Las instalaciones de operación de los timones principales y los planos de inmersión, son similares en su construcción, fundamental de los motores de conducción y los servos de dirección. Cada instalación de dirección (timón principal, los planos de popa de buceo y los planos de proa de buceo) se componen de las siguientes partes:
El motor para el funcionamiento y gobierno del timón principal, así como los motores de la instalación de los planos de inmersión, están fabricados por BBC, y son gobernados por corriente contínua. Disponen de 4 polos con devanado compuesto y el motor eléctrico va acoplado a una caja de engranajes fabricada por Köllmann. |
|
El puesto del timonel en la "centrale" del U995. Señalado en rojo se encuentra el control hidráulico del timón, donde apreciamos perfectamente los pulsadores. Justo encima se encontraba un compás (desaparecido en el U995). |
El final de carrera o interruptor de límite de carrera, asegura que el motor y caja de engranajes acoplada, se detendrán cuando se alcance la posición final. Inmediatamente después de la desconexión del motor, el devanado del inducido está en cortocircuito con la resistencia de ruptura (ruptor de la resistencia de campo y derivación), con el fin de detener el motor. Arranque, resistencia de ruptura y resistencia shunt de derivación, se utilizan para arrancar el motor de nuevo. El interruptor de corte y apagado, se usa para detener el motor por corto-circuito del devanado y proteger el devanado de campo de alta autoinducción, que se apagan respectivamente. La caja de engranajes acoplada, convierte las revoluciones de alta velocidad del motor a revoluciones de baja velocidad. |
 |
El puente del U776. Señalados en rojo se encuentran los controles del timón (idénticos a los visto es la imagen anterior del U995) y encima vemos el compás. |
Instalación del timón principal
|
Instalación planos de inmersión de proa
Instalación planos de inmersión de popa
|
 |
En la imagen de la derecha, en su parte izquierda, vemos la popa de un tipo IX donde apreciamos
los hidroplanos, los timones principales, y una de las hélices. A la derecha, vemos la proa de un Tipo VII (el U99), en la parte inferior de la roda vemos los hidroplanos de proa. |
|
| Sistema de gobierno en superficie e inmersión |
|
La instalación de gobierno en superficie incluye lo siguiente:
Construcción del plano de dirección Para mantener la fuerza motriz baja, todos los planos de dirección e inmersión están construidos como de desplazamiento, con timones equilibrados. Están hechos de planchas estancas en ambos lados, con los refuerzos previstos entre las placas. Los espacios entre las placas están llenos de madera alquitranada.Protecciones de los planos de los timones de inmersión y gobierno Se proporciona un talón para proteger el timón principal, especialmente contra golpes de la parte inferior, desde la cual dos brazos sujetan ambos timones y están unidos a los pasadores de timón. Para evitar que se enrede con los cables de minas navales y redes antisubmarinas, todas las uniones van alisadas y todas las caras son redondeadas. Los bordes exteriores de los planos de inmersión están protegidos contra cables de minas navales. |
 |
Para evitar la corrosión (corriente galvánica entre bronce y acero en el agua salada del mar) todos los planos de gobierno están provistos de placas de protección de zinc. |
 |
En esta imagen podemos ver perfectamente los timones, planos de inmersión de popa y protecciones de un Uboot del Tipo VII. |
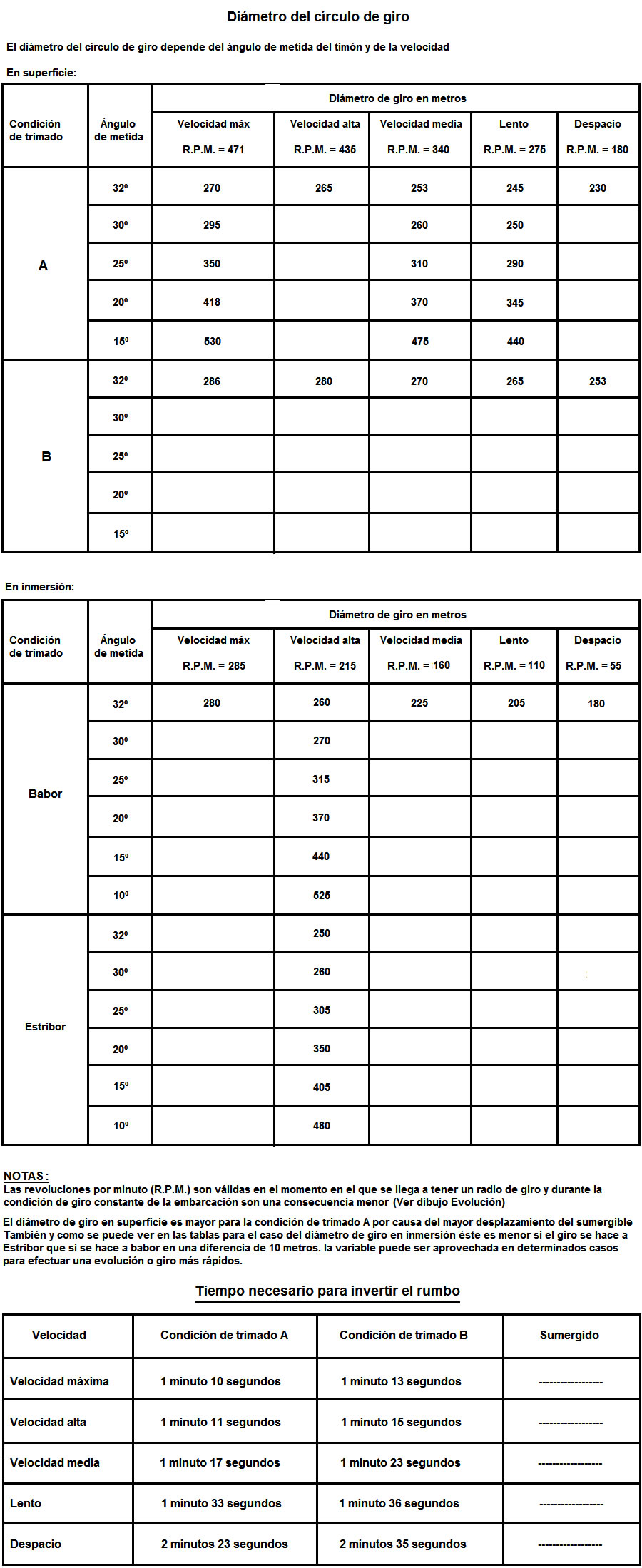
Instalación del timón principal La instalación del timón principal es de tipo doble, y puede ser accionado eléctricamente o manualmente. En la parte superior del eje intermedio (en la cubierta superior), está unido a un brazo doble, que está conectado, por medio de dos varillas de conexión larga, con los dos brazos de los timones. Cada timón principal tiene una superficie de 2,75 m². La máxima deflexión del timón es de 33° cuando el accionamiento es eléctrico, y de 35º cuando es accionado manualmente. |
 |
Alumnos realizando prácticas de navegación en inmersión. En este caso manejando los controles de los hidroplanos en un simulador de la "centrale". |
Instalación de los planos de buceo o inmersión de proa y popa Los planos de buceo de proa y popa, están montados sobre ejes comunes. La deflexión máxima de los planos de proa es de 30º hacia arriba y 30º hacia abajo, para los planos de popa 25º hacia arriba y 35º hacia abajo. El husillo accionado por un motor eléctrico, mueve la varilla de empuje y a través de la conexión con la palanca de eje del timón, desvía los planos de inmersión hacia arriba o abajo. Los planos de buceo de popa tienen cada uno una superficie de 2,25 m², En los planos de proa esa superficie es de 2,4 m². |
 |
Los controles de los hidroplanos situados en la "centrale" del U995 (casi idénticos a la imagen anterior del simulador). En este caso, a diferencia de lo que ocurre con el control del timón, además de los accionadores hidráulicos, es posible utilizarlos "manualmente" por medio de un volante. Justo encima de los controles, vemos los indicadores de la inclinación de los hidroplanos. |
 |
| Instalación del ancla y del cabrestante |
La instalación del anclaje consta de:
|
Molinete y cabrestante Los U-boote están equipados con el ancla sin cepo tipo Hall y la longitud de la cadena es de 150 metros. El peso es de 400 kg para el ancla y de 1.676 kg. para la cadena. La cadena consta de 6 piezas de 25 metros de longitud conectados por medio de grilletes. |
 |
En esta imagen de la proa del U766 podemos ver el molinete (círculo azul) y el ancla (cuadrado amarillo). |
Instalación y motor de molinete y cabrestante. Características El motor de molinete y cabrestante de aire comprimido, está construido como una bomba de engranajes bi-direccional. Según la dirección de giro requerida, el aire comprimido es admitido desde uno o el otro lado de dos rotores de dientes del engranaje.
|
| Esquema |
 |
Clickad en la imagen para ampliarla |